ПРИМЕНЕНИЕ КОСОУГОЛЬНОГО ПРОЕЦИРОВАНИЯ ДЛЯ ИЗМЕРЕНИЯ НЕРОВНОСТЕЙ ПОПЕРЕЧНОГО ПРОФИЛЯ ПОКРЫТИЯ АВТОМОБИЛЬНЫХ ДОРОГ
Научная статья
Федоров С.А.1, *, Хромченко А.В.2
1 ORCID: 0000-0002-5410-3916;
1, 2 Тихоокеанский государственный университет, Хабаровск, Россия
* Корреспондирующий автор (fedoroff27[at]mail.ru)
Аннотация
При эксплуатации автомобильной дороги происходит снижение ровности поверхности покрытия в продольном и поперечном направлениях относительно оси проезжей части. Это явление ухудшает транспортно-эксплуатационные качества автомобильной дороги.
Авторами предложено применение косоугольного проецирования для оценки ровности покрытия автомобильной дороги в поперечном направлении. Данный метод основан на получении необходимых данных по фото- или цифровым снимкам, которые фиксируют видимый след пересечения наклонной лазерной плоскости с поверхностью полотна дороги.
В статье приведена принципиальная схема устройства установки для производства измерений в статическом или динамическом режимах, а также оценена точность получаемых результатов при проведении измерительных работ.
Ключевые слова: метод «косого сечения», автомобильная дорога, ровность покрытия, лазерная плоскость, курсовая линия, поперечный профиль, масштаб изображения, точность измерения.
THE USE OF OBLIQUE PROJECTION FOR MEASURING THE CROSS-SECTION DEFORMATION
OF ROAD SURFACES
Research article
Fedorov S.A.1, *, Khromchenko A.V.2
1 ORCID: 0000-0002-5410-3916;
1, 2 Pacific National University, Khabarovsk, Russia
* Corresponding author (fedoroff27[at]mail.ru)
Abstract
When a road is used, the flatness of the surface of the pavement decreases in the longitudinal and transverse directions relative to the axis of the roadway. This phenomenon worsens the transport and operational qualities of the road.
The authors of the article propose the usage of oblique projection to assess the evenness of the road surface in the transverse direction. This method is based on obtaining the necessary data from a photo or digital images that capture the visible trace of the intersection of the inclined laser plane with the surface of the roadbed.
The article presents a schematic diagram of the device to conduct the measurements in static or dynamic modes as well as estimates the accuracy of the results obtained during the measurements.
Keywords: “oblique section” method; roadway, flatness of the surface, laser plane, heading line, cross section of road, image scale, measurement accuracy.
Введение
При эксплуатации автомобильной дороги происходит ухудшение ровности поверхности покрытия в продольном и поперечном направлениях относительно оси проезжей части, что приводит к повышению аварийности [1].
Снижение ровности покрытия в продольном направлении обусловливается образованием на проезжей части микро- и макро-неровностей с длиной волны до 100 м.
В поперечном профиле неровности характеризуются меньшими размерами и в основном определяются параметрами волн выпора и углублений колеи в пределах полос наката. Безусловно, ровность поверхности проезжей части дороги в каждом направлении дополнительно зависит от размеров и частоты трещин, выбоин, просадок и других видов локальных деформаций и повреждений покрытия [2].
Измерение ровности покрытия выполняют инструментальными методами в процессе обследования дорог, производимого с целью получения широкого спектра показателей для характеристики состояния дороги.
При выборочном контроле ровности покрытия в продольном направлении традиционно применяют 3-х метровую рейку с клиновым промерником, геометрическое нивелирование с заданным шагом [3]. При сплошном обследовании используют толчкомеры различных конструкций, дорожные профилометры [4]. В поперечном направлении ровность обычно оценивают по результатам измерения просветов под 3-х метровой рейкой либо по данным геометрического нивелирования поперечных профилей [5], [6], [8].
Здесь следует заметить, что применяемые на практике технологии выборочного контроля ровности покрытия дорог характеризуются значительным объёмом «ручных» работ при выполнении измерений. Поэтому в настоящее время оценка ровности покрытия сводится в основном к оценке продольной ровности по полосам наката и к измерению поперечных уклонов с помощью автоматизированных средств измерений, установленных на передвижных лабораториях КП-514МП «Трасса».
Известна также автоматизированная технология съёмки проезжей части автомобильных дорог и мостов, разработанная в научно-инженерном дорожном центре Сибирского государственного университета путей сообщения на основе прицепного трёхколёсного модуля «Диагностика». Данный аппаратно-программный комплекс позволяет осуществить отрисовку рельефа и создание цифровой модели поверхности дороги. Эта задача решается совместной компьютерной обработкой совокупности 3-5 смежных продольных профилей, построенных каждый по новой линии траектории движения первого колеса прицепного модуля. Следует отметить, что при ограниченном числе продольных проездов модуля поперечные профили не могут быть определены достаточно точно, поскольку для их построения необходима высокая плотность продольных профилей [9].
Оценку ровности покрытия в поперечном направлении также целесообразно производить методом сплошного контроля, так как показатель продольной ровности и поперечный уклон поверхности полосы наката не являются исчерпывающими характеристиками действительных очертаний поперечного профиля. В качестве примера можно отметить тот факт, что поперечный профиль может иметь неровности в виде волн различного размера вследствие образования колеи либо может иметь вид вогнутой или выпуклой поверхности.
Основные результаты
Косое сечение поверхности покрытия 1 (см. рисунок 1) производится лазерной плоскостью 2, создаваемой вращающимся портативным источником лазерного излучения 3 с целью получения, видимой глазом, линии АСВ «рассечения» (разреза) исследуемой поверхности. Источник лазерного излучения устанавливается на высоте Н над поверхностью покрытия так, чтобы лазерная плоскость была наклонена под углом φ к линии отвеса, а ось вращения лазера принадлежала вертикальной плоскости, проходящей через курсовую линию ОМ.
Над линией АСВ косого сечения на высоте НКрасполагается фото- или цифровая камера (ЦК) 4, либо видеокамера (ВК), ориентированная объективом отвесно вниз. В общем случае камеры могут устанавливаться над курсовой линией ОM с наклоном под углом γ к линии отвеса, но так, чтобы оптическая ось камеры находилась в одной плоскости главного вертикала, проходящей через линию отвеса лазерного источника 3, и была направлена в точку С пересечения линии косого сечения с курсовой линией.
В свою очередь, курсовая линия ОМ образуется путём проектирования на поверхность покрытия видимого глазом лазерного луча, излучаемого неподвижным портативным источником излучения 5. Этот луч предназначен для задания курса и образования координатной линии на фото- или цифровом снимке. Данный лазерный прибор устанавливается на высоте НЛ таким образом, чтобы линия его луча составляла угол α с линией отвеса и находилась в плоскости главного вертикала, образованной лазером 3 и камерой 4.
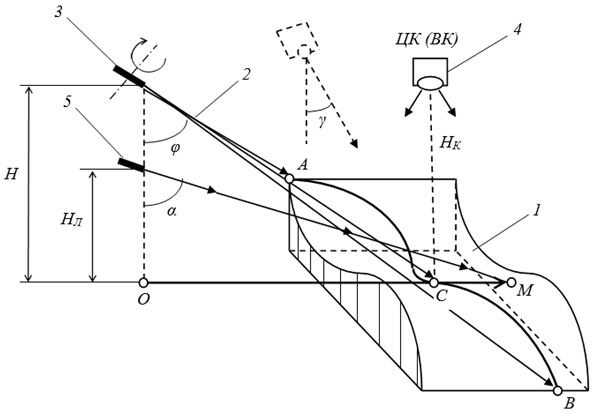
Рис. 1 – Схема образования косого сечения на поверхности покрытия
Известные в настоящее время портативные источники лазерного излучения промышленного изготовления имеют длину 62 мм при диаметре 14 мм, питаются от плоских миниатюрных батареек. Лазерный луч такого источника излучения имеет диаметр светового пятна 3-4 мм на расстоянии 7-10 м. Продолжительность непрерывной работы лазера без перезарядки достигает 4-х часов в летнее время.
Полученные при съёмке фотоснимки сканируются, а цифровые изображения адаптируются с целью передачи данных для обработки видеоизображений стандартными средствами на компьютере.
На рисунке 2 представлен снимок в масштабе 1:М с изображениями линии А’Е’С’В’ косого сечения и отрезка О’М’ курсовой линии, полученными при съёмке камерой участка поверхности покрытия.
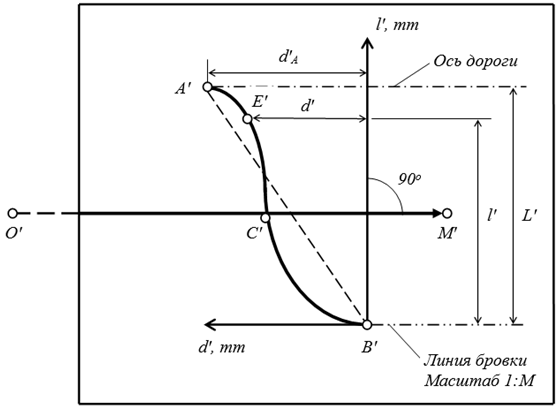
Рис. 2 – Схема определения координат линии косого сечения на снимке
Учитывая, что сечение А’Е’С’В’ выполнено лазерной плоскостью под углом φ к линии отвеса, становится возможным вычислить фактические координаты точек физической поверхности покрытия (см. рисунок 3) по следующим формулам:
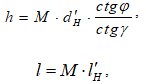
где h – фактическая условная отметка поверхности в точке профильной линии АСВ, рассчитанная относительно горизонтальной плоскости, проведенной через точку В (см. рисунок 1);
М – знаменатель масштаба снимка;
d‘, l‘ – координаты точки на снимке (экране);
l – фактическое расстояние до определяемой точки в системе координат линии поперечного профиля.
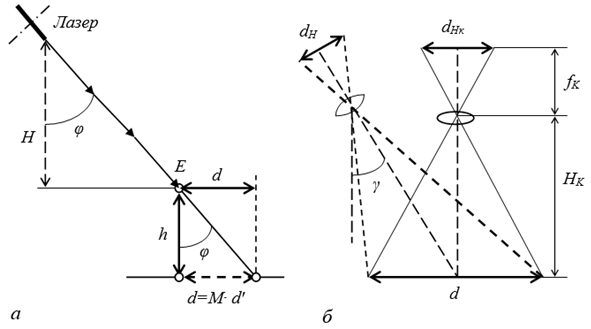
Рис. 3 – Зависимость высоты h неровности от заложения d (а) и определение масштаба изображения
на фотоснимке (б)
По результатам измерений и вычислений фактических высот и расстояний для точек линии косого сечения вычерчивают поперечный профиль поверхности покрытия в заданном масштабе. При необходимости вычисляют генеральный поперечный уклон покрытия вдоль линии А/В/(см. рисунок 2) по формуле:
Где d‘A , L‘ – измеренные на снимке координаты точки А’ линии косого сечения.
Высоту и длину неровностей поверхности покрытия определяют на снимке относительно линии А’В’ проекции главного уклона, для чего производят дополнительные измерения и вычисления, либо выполняют расчёты новых значений hНП отметок h путём исправления последних по формуле:
![]()
Следует заметить, что масштаб изображения на фотокадре в момент съёмки равен масштабу съёмки (см. рисунок 3) и вычисляется по формуле:
где МК – знаменатель масштаба изображения;
dK, d – соответственно расстояние между одноимёнными точками на фотокадре и в натуре;
fK – фокусное расстояние камеры;
HK – высота съёмки.
При образовании позитивного снимка или цифрового изображения на экране монитора, масштаб изображения для них изменится и станет равным:

где k – коэффициент увеличения снимка или его цифрового изображения относительно исходного масштаба съёмки.
Если вести съёмку следа косого сечения камерой, расположенной под углом γ к линии отвеса (см. рисунок 3), то в общем случае масштаб изображения в центре и на краях фотокадра (снимка) будет различным. Однако, учитывая, что ширина следа косого сечения в направлении курса съёмки составят 10-15 см, масштаб изображения в средней части снимка может быть принят постоянным и равным 1:М. Поэтому корректировка фактических координат точек профиля из-за наклона оси проекции камеры производится лишь в направлении курса съёмки по формулам:
где d/H , l/H – координаты точки на наклонном снимке;
γ – угол наклона оси камеры к линии отвеса в плоскости главного вертикала.
Если принять во внимание, что предельная точность измерения линии на снимке (экране монитора) составляет 0,2-0,3 мм в масштабе изображения, то при масштабе позитивного изображения равном 1:15 точность определения фактических высот неровностей профиля составит 3-5 мм. Эти значения взяты за основу при обосновании точности измерения высот неровностей поперечного профиля полотна дороги, производимых с помощью предлагаемого метода.
Практические результаты и рекомендации
Комплект оборудования для измерения неровностей поперечного профиля покрытия методом «косого сечения» монтируется на Г-образной раме, которая вертикально крепится к автомобилю с внешней стороны его корпуса с возможностью компенсации поперечных наклонов автомобиля относительно линии горизонта для того, чтобы ось съёмочной камеры находилась в плоскости отвеса. При этом полка рамы фиксируется на заданной высоте 2-2,5 м от поверхности покрытия дороги. Угол наклона лазерной плоскости к линии отвеса устанавливается равным, например, 45˚. Видеокамера крепится на консоли между линией отвеса лазерного источника излучения и линией косого сечения с целью уменьшения угла наклона оси камеры от вертикали. Измерения производят на остановках либо непрерывно при движении с малой скоростью. Для привязки поперечных профилей к существующему километражу дороги можно использовать GPS-приёмник или электронный счётчик пройденного пути.
Выполненные расчёты показывают, что при угловой скорости вращения лазера ω = 1200 об./с, образующего секущую плоскость, и при ширине «захвата», равной 3,0 м, видимый след лазера отобразится на каждых пяти кадрах видеокамеры при «пустом» шестом кадре. При ширине «захвата» 9,0 м полный след лазерного сечения отобразится на двух кадрах видеокамеры, а каждый третий кадр будет «пустым». Это следует учитывать при выполнении съёмочных работ и организации скорости движения установки. Результаты видеосъёмки покрытия в режиме образования косых сечений могут служить доказательным видеоматериалом при визуальной оценке по снимкам ровности покрытия в поперечном профиле дороги.
Данный метод измерения неровностей покрытия автомобильных дорог рекомендуется применять при пасмурной погоде, в сумеречное или тёмное время суток для получения чёткого следа лазерных линий на исследуемой поверхности.
Заключение
Таким образом, в настоящей статье для получения объективных данных о конфигурации и размерах неровностей покрытия в поперечном к оси дороги направлении предлагается косоугольное проецирование [10], на основе которого предложен метод «косого сечения», включающий методику, приборы и способ измерения размеров неровностей при статическом и динамическом режимах производства работ.
| Конфликт интересов
Не указан. |
Conflict of Interest
None declared. |
Список литературы / References
- Чванов В. В. Исследование влияние продольной ровности поверхности дорожного покрытия на безопасность дорожного движения / В. В. Чванов, Д. А. Стрижевский // Дороги и мосты. – 2009. – № 1 (21). – С. 191-198.
- Леонович И. И. Диагностика автомобильных дорог : учеб. пособие / И. И. Леонович, С. В. Богданович, И. В. Нестерович. – Минск : Новое знание; М.: Инфра-М, 2011. – 350 с.: ил.
- ОДМ 218.4.039-2018. Рекомендации по диагностике и оценке технического состояния автомобильных дорог. Издан на основании распоряжения Федерального дорожного агентства от 04.07.2018 № 2481-р [Электронный ресурс]. – URL://rosavtodor.ru/storage/app/uploaded-files (дата обращения 20.02.2019).
- Пат. RU 179921 U1 Россия, E01C 23/07. Универсальный ультразвуковой профилометр для измерения поперечной ровности дорожного покрытия / Цаль А. Ю., Середа П. О.; заявитель и патентообладатель федеральное государственное бюджетное образовательное учреждение высшего образования «Донской государственный технический университет» (ДГТУ). – № 2018103445; заявл. 01.2018; опубл. 29.05.2018, Бюл. № 16. – 6 с.
- СП 78.13330.2012. Автомобильные дороги. Актуализированная редакция СНиП 3.06.03-85. – Введ. 01.06.2013 г. – М.: Минрегион России, 2012. – 68 с.
- ГОСТ 33101-2014. Дороги автомобильные общего пользования. Покрытия дорожные. Методы измерения ровности. – Введ. 2016-08-01. – М.: Стандартинформ, 2016. – 28 с.
- Пат. RU 2156843 C2 Россия, E01C 23/07, G01B 3/04. Рейка для измерения ровности асфальтобетонного покрытия / Медрес Л. П., Сац И. Я., Чугаев Г. Л., Тимошенко А. И., Иевлев В. М.; заявители и патентообладатели Медрес Лев Петрович, Сац Иосиф Яковлевич. – № 98100511/03; завл. 01.1998; опубл. 27.09.2000. – 6 с.
- Пат. RU 2625091 C1 Россия, G01C 3/20. Способ определения поперечной ровности (колейности) поверхности дорожного полотна автомобильной дороги / Середович В. А., Середович А. В., Ткачева Г. Н.; заявитель и патентообладатель федеральное государственное бюджетное образовательное учреждение высшего образования «Сибирский государственный университет геосистем и технологий» (СГУГиТ). – № 2016109719; заявл. 03.2016; опубл. 11.07.2016, Бюл. № 20. – 7 с.
- Барсук М. Н. Совершенствование методов и средств оценки технического состояния автомобильных дорог по геометрическим и эксплуатационным параметрам : дис. … канд. техн. наук : 05.23.11 : защищена 12.12.2013 : утв. 06.05.2014 / Барсук Марина Николаевна. – Новосибирск, 2013. – 163 с.
- Жирных Б. Г. Начертательная геометрия: учебник / Б. Г. Жирных, В. И. Серегин, Ю. Э. Шарикян/ Под общ. ред. В. И. Серегина – 1-е изд. – М. : Изд-во МГТУ им. Н. Э. Баумана, 2015. – 168 с.: ил.
Список литературы на английском языке / References in English
- Chvanov V. V. Issledovaniye vliyaniye prodol’noy rovnosti poverkhnosti dorozhnogo pokrytiya na bezopasnost’ dorozhnogo dvizheniya [Study of the effect of longitudinal flatness of the road surface on road safety] / V. V. Chvanov, D. A. Strizhevskiy // Dorogi i mosty [Roads and bridges]. – 2009. – № 1 (21). – P. 191-198. [in Russian]
- Leonovich I. I. Diagnostika avtomobil’nykh dorog : ucheb. posobiye [Diagnostics of highways : manual] / I. I. Leonovich, S. V. Bogdanovich, I. V. Nesterovich. – Minsk : Novoe znanie; M.: Infra-M, 2011. – 350 p.: il. [in Russian]
- ODM 218.4.039-2018. Rekomendatsii po diagnostike i otsenke tekhnicheskogo sostoyaniya avtomobil’nykh dorog. Izdan na osnovanii rasporyazheniya Federal’nogo dorozhnogo agentstva ot 04.07.2018 № 2481-r [Recommendations for the diagnosis and assessment of the technical condition of highways. Published on the basis of the order of the Federal Road Agency dated 04.07.2018 No. 2481-r] [Electronic resource]. – URL://rosavtodor.ru/storage/app/uploaded-files (accessed 20.02.2019). [in Russian]
- RU 179921 U1 Russia, E01C 23/07. Universal’nyy ul’trazvukovoy profilometr dlya izmereniya poperechnoy rovnosti dorozhnogo pokrytiya [Universal ultrasonic profilometer for measuring the lateral flatness of the road surface] / Tsal’ A. Yu., Sereda P. O.; the applicant and the patentee federal state budgetary educational institution of higher education «Don state technical university» (DSTU). – № 2018103445; appl.30.01.18; publ. 29.05.2018, Bul. Number 16. – 6 p. [in Russian]
- SP 78.13330.2012. Avtomobil’nye dorogi. Aktualizirovannaya redaktsiya SNiP 3.06.03-85 [Highways. Updated edition Building regulation 3.06.03-85]. – Vved. 01.06.2013. –M.: Minregion Rossii, 2012. – 68 p. [in Russian]
- GOST 33101-2014. Dorogi avtomobil’nyye obshchego pol’zovaniya. Pokrytiya dorozhnyye. Metody izmereniya rovnosti [Public roads. Road pavements. Flatness measurement methods]. – Intr. 2016-08-01. – M.: Standartinfom, 2016. – 28 p. [in Russian]
- RU 2156843 С2 Russia, E01C 23/07, G01B 3/04. Reyka dlya izmereniya rovnosti asfal’tobetonnogo pokrytiya [Rail for measuring the evenness of asphalt concrete pavement] / Medres L. P., Sats I. Ya., Chugaev G. L., Timoshenko A. I., Ievlev V. M.; the applicants and the patentees Medres Lev Petrovich, Sats Iosif Yakovlevich. – № 98100511/03; appl. 05.01.98; publ. 27.09.00, – 6 p. [in Russian]
- RU 2625091 C1 Russia, G01C 3/20. Sposob opredeleniya poperechnoy rovnosti (koleynosti) poverkhnosti dorozhnogo polotna avtomobil’noy dorogi [Method for determining the lateral evenness (wheeltracking) of the roadway deck of a highway] / Seredovich V. A., Seredovich A. V., Tkacheva U. Y.; the applicant and the patentee federal state budgetary educational institution of higher education «Siberian state university of geosistems and technologies» (SSUGT). –
№ 2016109719; appl. 17.03.16; publ. 11.07.16, Bul. Number 20. – 7 p. [in Russian] - Barsuk M. N. Sovershenstvovaniye metodov i sredstv otsenki tekhnicheskogo sostoyaniya avtomobil’nykh dorog po geometricheskim i ekspluatatsionnym parametram [Improvement of methods and means for assessing the technical condition of highways by geometric and operational parameters] : dis. … of PhD in Engineering : 05.23.11 : defense of the thesis 12.12.13 : approved 06.05.14 / Barsuk Marina Nikolaevna. – Novosibirsk, 2013. – 163 p. [in Russian]
- Zirnykh B. G. Nachertatel’naya geometriya : uchebnik [Descriptive geometry : manual] / B. G. Zhirnykh, V. I. Seregin, Yu. E. Sharikyan ; edited by V. I. Seregina. – 1st edition. – M.: MGTU im. N. E. Baumana Publishing house, 2015. – 168 p.: il. [in Russian]





